
 English
English


ربات ها ماشین های کوری هستند که بر اساس کدهای داخلی خود عمل می کنند؛ ابزار سخت جانی که به شدت از کدها پیروی می کنند و وظایف تعیین شده را به طور کامل انجام می دهند. خستگی ناپذیری و عدم کاهش دقت، ربات ها را برای کارهای تکراری و سنگین که می توانند از نظر فیزیکی کسل کننده و چالش برانگیز باشند ایده آل می کند.
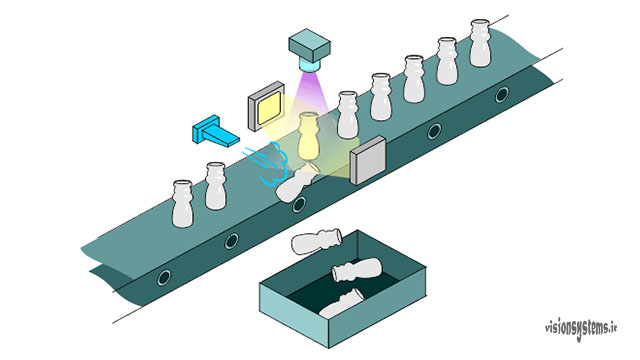
همگام با پیشرفت صنعت و هوشمند سازی بسیاری از فرآیندها، ربات ها نیز رو به تکامل رفتند. یکی از محورهای تکامل رباتیک ایجاد یک سیستم بینایی در ربات است. سیستم ویژن، ربات ها را برای انجام هوشمند فرآیندها هدایت می کند. سیستم های بینایی ماشین به ربات ها کمک می کنند تا کارهایی مانند کنترل کیفی و بازرسی، شمارش، اندازه گیری، خواندن بارکد، جابه جایی و … را به طور خودکار انجام دهند. هدایت ربات ها با استفاده از سیستم های ویژن را به طور مختصر ربات ویژن می نامیم. در این مقاله در مورد نحوه عملکرد سیستم ویژن در هدایت ربات و نمونه ای از پرکاربرد ترین ربات های صنعتی تحت عنوان ربات های pick and place را بررسی خواهیم کرد.
سیستم ویژن در ربات چگونه عمل می کند؟
برای استفاده از سیستم ویژن در ربات حداقل یک دوربین نصب خواهد شد که به عنوان چشم دستگاه عمل می کند. عملکرد سیستم ویژن در ربات ها سه بخش دارد:
- گرفتن عکس : دوربین ها، تصاویر دو بعدی یا سه بعدی را از جسم می گیرد و تصاویر در پایگاه داده ذخیره می شوند.
- پردازش تصویر: این تصاویر، با الگوی تعریف شده در برنامه پردازش تصویر مقایسه می شود. وقتی تطابق با الگو وجود داشته باشد، سیستم اطلاعات مورد نیاز را از طریق پردازش تصاویر استخراج می کند. این اطلاعات می تواند رنگ، شکل ظاهری مختصات مکان و … باشند.
- ارتباط و انتقال : اطلاعات از طریق پروتکل های ارتباطی به ربات منتقل می شود تا عمل تعریف شده در برنامه داخلی ربات روی محصول انجام گیرد.
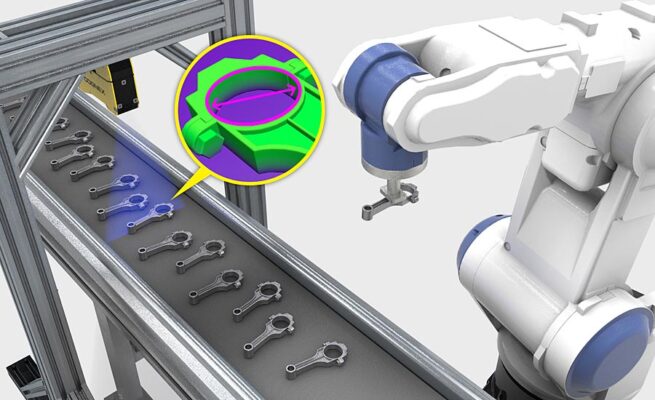
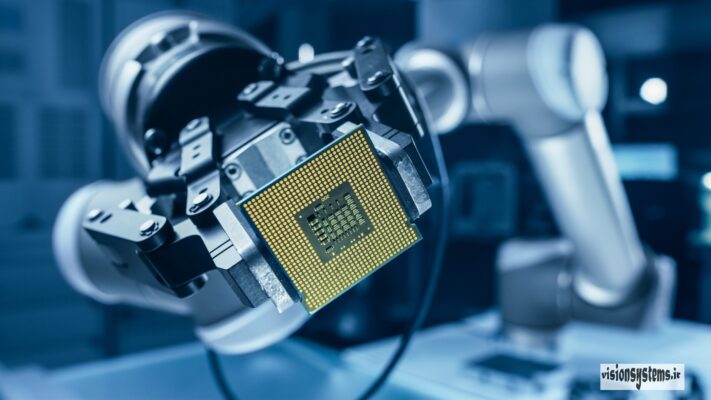
در تصویر بالا عکس به وسیله دوربین گرفته می شود. با استفاده از پردازش تصویر مختصات قطعه و قطر دایره درونی اندازه گیری و اطلاعات حاصل از پردازش تصویر به ربات منتقل می گردد و در نهایت ربات بر مبنای اطلاعات حاصل، قطعه ها را جابه جا و تفکیک می کند. در حال حاضر بیشتر سیستم های بینایی ربات ها برای بازرسی و جابه جایی محصولات استفاده می شود. به ربات هایی که عمل برداشتن و گذاشتن محصولات را انجام می دهند اصطلاحا ربات های pick and place می گویند. در ادامه توضیح مختصری از مراحل عملکرد سیستم ویژن در ربات را مرور می کنیم .
استفاده از دوربین های دو بعدی و سه بعدی در اتوماسیون با ربات ویژن
برای آنکه یک ربات بتواند قطعه را بردارد باید مختصات مکان آن را از سیستم ویژن دریافت کند. اگر جابجایی محصول روی صفحات ثابت یا متحرک (مثل نوار نقاله) باشد مختصات x و y و احتمالا میزان چرخش نسبت به الگو (در مواردی که محصول باید از جهت مشخصی برداشته شود) باید به ربات فرستاده شود. در این حالت استفاده از دوربین دو بعدی برای به دست آوردن x و y و میزان rotation کفایت می کند. در شکل زیر دو دوربین یکی به طور ثابت و یکی روی بازوی ربات نصب شده که ربات را برای برداشتن و جایگذاری قطعه هدایت می کنند.
چنانچه بخواهیم محصولات را از روی هم برداریم مختصه سوم که ارتفاع است اهمیت پیدا می کند و نیاز به مختصه z داریم. چنانچه شکل محصول پیچیده نباشد می توانیم از حداقل سه دوربین به صورت همزمان استفاده کنیم و با ترکیب سه عکس مختصه z را استخراج نماييم. به الگوریتمی که این کار را انجام می دهد اصطلاحا استریو می گوییم. استفاده از دوربین سه بعدی نیز می تواند سه مختصه را به دست دهد، ولی این دوربین ها نسبتا پرهزینه می باشند.

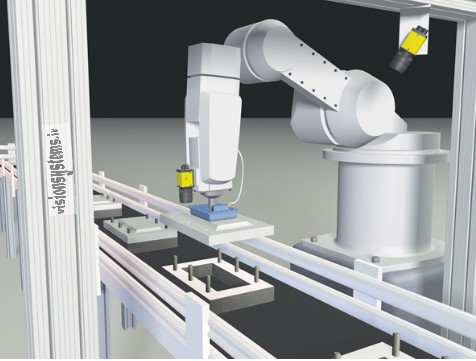
در شکل بالا ویژن مختصات مکان و میزان چرخش و رنگ مکعب ها را روی نوار نقاله تشخیص می دهد و اطلاعات را به ربات انتقال می دهد. ربات، مکعب را در جهت مناسب برمی دارد و در جای خالی مربوط به رنگ مربوط که سه مختصه فضایی آن را نیز از ویژن دریافت کرده قرار می دهد. مختصاتی که از تصاویر دوربین ها به دست می آیند باید نسبت به مختصات ربات کالیبره شوند تا برای ربات قابل استفاده باشند.
کالیبراسیون بین دوربین و بازوی ربات (hand eye calibration)
ربات موقعیت انتهایی گیره اش (EE) را نسبت به مختصات مرجع خود می داند. بنابراین برای برداشتن یک جسم توسط ربات آنچه نیاز داریم این است که موقعیت جسم (OBJ) را نسبت به مختصات ربات (ROB) بدانیم. ولی اطلاعاتی که با استفاده از توابع و اپراتور های پردازش تصویر به دست می آید موقعیت جسم نسبت به دوربین (CAM) می باشد. کالیبراسیون دست_چشم به این معناست که ما بتوانیم با استفاده از تبدیلات خطی مناسب مختصات جسم را نسبت به ربات بسنجیم.
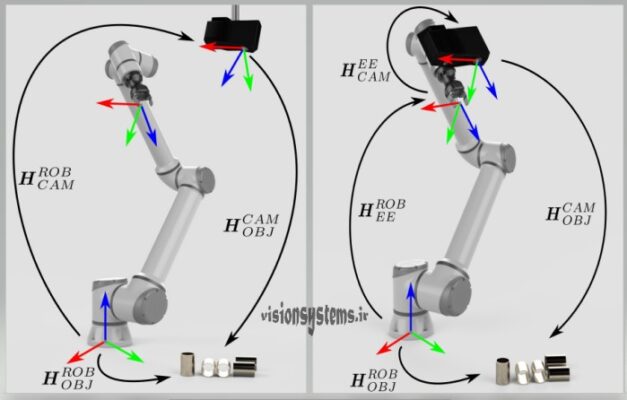
همانطور که در تصویر مشاهده می کنید دو حالت کلی را می توانیم در نظر بگیریم. یکی اینکه دوربین در مکانی ثابت نسبت به جسم قرار گرفته باشد و دوم حالتی که دوربین روی بازوی ربات نصب شود. در هر دو مورد با تکمیل شدن منحنی بسته تبدیلات خطی که در شکل با علامت H بین دو دستگاه مختصات مربوط نشان داده شده قادر خواهیم بود مختصات جسم نسبت به ربات را پیدا کنیم. برای جزئیات بیشتر در این مورد می توانید از مشاوره تیم ویژن سیستم استفاده کنید.
پردازش تصویر در ربات صنعتی هوشمند
ربات های هوشمند علاوه بر جابجایی اقلام می توانند وظایفی همچون بازرسی و کنترل کیفیت، بسته بندی، مونتاژ قطعات و … را با دقت بالا انجام دهند. نرم افزار هالکن یک برنامه پردازش تصویر قدرتمند است و بر مبنای توابع آن و الگوریتم ها می توان کدهای مربوط به شناسایی اشیا، بازرسی و کنترل کیفی انواع محصولات و … را برای حل انواع چالش های صنعت تنظیم کرد. این نرم افزار برای استفاده در صنعت بهینه شده است و قابلیت اتصال به انواع سخت افزارهای حوزه اتوماسیون صنعتی را دارد.
هوشمندسازی ربات با اتصال به برنامه پردازش تصویر
غالبا پردازش تصویر محصولات با هدف گرفتن یک خروجی مکانیکی در صنعت انجام می گیرد؛ بنابراین تعیین استانداردها یا پروتکل های ارتباطی بین نرم افزار و قسمت های مکانیکی از مهمترین بخش هایی است که باید به آن پرداخته شود.
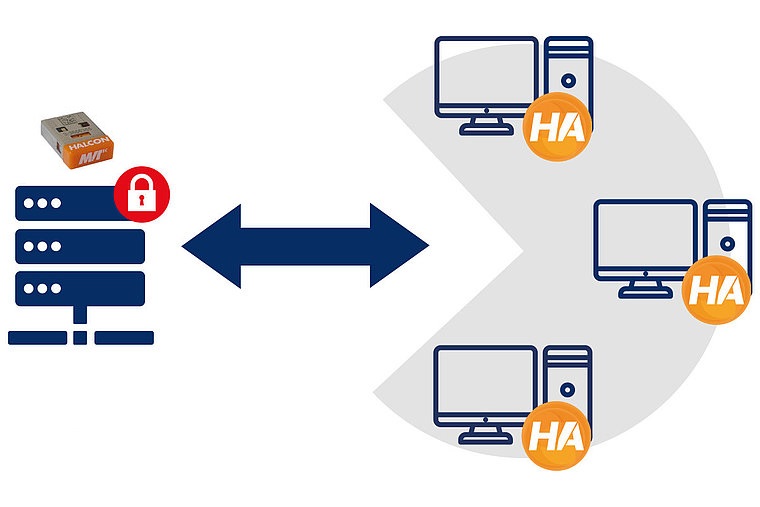
پروتکل ارتباطی modbus از پرکاربرد ترین پروتکل ها در صنعت می باشد. هالکن تحت پروتکل مدباس با PLC ارتباط برقرار می کند. در دوره آموزش بینایی ماشین جزئیات و تنظیمات سخت افزاری برای ارتباط PLC با هالکن به صورت کاربردی تشریح شده است. در بسیاری از ربات ها PLC به عنوان واسط بین ربات و نرم افزار قرار دارد. PLC از طریق کابل اترنت یا کابل سریال RS485 و … با ربات ارتباط برقرار می کند.
ربات های pick and place بازوهای خستگی ناپذیر صنعت اتوماسیون
ربات هاي pick and place کاربردهای مختلفی در صنعت دارند. در صنایع مختلف هر جا که نیاز به جابجایی انواع قطعات یا محصولات باشد می توان ربات های pick and place را به کار گرفت. بسته به نیازی که در صنعت وجود دارد طرح های مختلفی از ربات ها انتخاب و مورد استفاده قرار می گیرند. این رباتها معمولاً روی یک پایه ثابت نصب میشوند و بازوی بلندی دارند که میتواند به کل منطقه عملیاتی آنها دسترسی داشته باشند. بازو می تواند 3 تا 6 محور داشته باشد. انتهای بازو گیره است و به نوع اشیایی که ربات قصد حرکت آن را دارد اختصاص دارد.
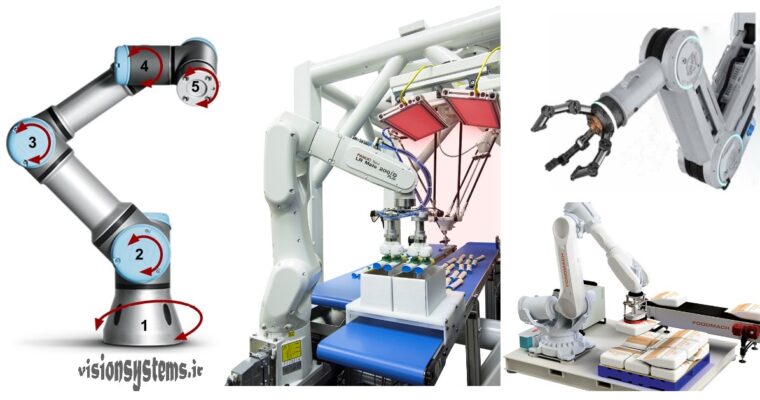
ربات ها می توانند اقلام را بین سطوح ثابت و متحرک جابجا کنند، اقلام را روی هم بچینند یا بسته به نوع وظیفه مونتاژ و بسته بندی انجام دهند. در شکل بالا از چپ به راست رباتی با 5 محور حرکتی، یک نمونه ربات بسته بندی، یک ربات پالت (پشته) ساز و یک نمونه از گیره های انتهایی بازو ربات را مشاهده می کنید.

استفاده ربات ها به افزایش سرعت تولید و کاهش هزینه نهایی کمک می کند. به عنوان مثال در صنایع غذایی که نیاز به جابه جایی محصولات در شرایط بهداشتی و با سرعت بالا می باشد استفاده از نوع خاصی از ربات ها موسوم به ربات های دلتا کاربرد گسترده ای پیدا کرده اند؛ این ربات ها عموما سه بازو دارند و بالای نوار نقاله نصب می شوند و برای گذاشتن محصولات در بسته استفاده می شوند.
کنترل کیفیت و بازرسی قطعه با ربات ویژن
در ویدئو زیر یک نمونه نمایشگاهی از ربات ها را مشاهده می کنید که هدف آن جداسازی قطعات بر اساس نوشته روی آنهاست. در این نمونه، همزمان با جابجایی کنترل کیفیت و بازرسی محصول انجام می شود. مغز فعال این سیستم نرم افزار قدرتمند پردازش تصویر هالکن است. همانطور که گفته شد هالکن به سادگی به انواع دوربین ها متصل می شود همچنین قادر است به صورت مستقیم یا به واسطه PLC با ربات ارتباط برقرار کند و مختصات مکان و سایر اطلاعات حاصل از پردازش تصویر را برای هدایت ربات به کنترلر آن بفرستد.
تفکیک قطعات با اتصال دوربین به ربات صنعتی
در ویدئو زیر یک نمونه نمایشگاهی از ربات را مشاهده می کنید که هدف آن جدا سازی قطعات بر اساس رنگ آنهاست. سیستم ویژن شامل اجزای اصلی دوربین، لایت ، نرم افزار پردازش تصویر است؛ همانطور که در تصویر زیر مشاهده می کنید چهار تا از دوربین ها، روی پایه ای جدا و در مکانی ثابت نصب شده اند. سیستم ویژن با استفاده از پردازش عکس های ارسالی از دوربین ها اطلاعات مورد نیاز را استخراج و به ربات انتقال می دهد.
برای تفکیک قطعات دو مرحله را می توانیم در نظر بگیریم: 1.تشخیص مختصات مکان و برداشتن قطعه 2. تشخیص رنگ و جایگذاری آن در ردیف مناسب:
- مرحله اول : برای تشخیص مختصات مکان، سیستم ویژن از سه دوربین استفاده می کند و از سه جهت مختلف از بسته ها عکس می گیرد. با پردازش این سه عکس، سه مختصه مکان بسته را تشخیص می دهد و تصویری سه بعدی می سازد که روی مانیتور نمایش داده می شود. در شکل زیر سه دوربین که از زوایای مختلفی عکس می گیرند و تصویر سه بعدی حاصل روی صفحه مانیتور مشخص شده است.

- در مرحله دوم یعنی تفکیک قطعات و جايگذاری در ردیف درست باید رنگ قطعه را تعیین کنیم. در اینجا سیستم ویژن برای شناسایی رنگ قطعات از دوربین جداگانه ای استفاده کرده است. ربات، قطعه برداشته شده را جلوی دوربین می گیرد تا رنگ آن توسط پردازش تصویر مشخص شود. بر اساس رنگ تشخیص داده شده ربات این قطعه را در ردیف مربوط قرار می دهد.



ایکاش کار درجه بندی هم انجام میداد